

-
基于碰撞检测的护理型操作臂的安全性设计与实现
基于碰撞检测的护理型操作臂的安全性设计与实现
摘要:针对与人近距离交互的护理型操作臂的安伞性问题,提出并实现了一种基于碰撞检测的安伞性设计方法,它根据由动力学模型计算获得的参考输出力矩,‘j力矩传感器测得的际输}}j力矩问的偏差实现碰掩榆测.谯关节力矩传感器设计中,采用有限几分析方法来优化虑变片的位置布置,并开发1r高抗十扰能力的信号处理电路.根据护理型操作臂的低速特点,提{li|r一种动力学简化模型,在参考输{fj力矩的计算效率和精确性之间实现丫折中.实验结果表明本设计具有较高的灵敏度和实时性.
关键词:护理型操作臂;安全性;碰撞榆测:力矩传感器
l引言(Introduction)
护理型操作臂可以帮助上肢残疾或视力有障碍的残疾人和老年人,部分或全部地实现生活自理,如取物、助餐、开门、洗漱等操作,提高他们的独立生活能力.由于其丁作在人的周同,与人距离近甚至直接接触,所以要特别强调友好型的设计,在安全性方面有其特殊的要求.在操作臂作业过程中,快速、准确地检测碰撞并及时采取保护措施,可以有效提高操作臂的安全性.
针对护理型操作臂的安全性技术研究受到越来越多的关注,主要包括两大类:一个是机械机构的安全性设计,另一个是控制系统的安全性设计.机械机构的安全性设计方法,包括机构的轻璎化【l】、考虑关:肖速度和力矩限制的传动机构设计【2】、串联弹性动(series elastic acmation)等技术,力图通过有效地减轻操作臂的重量和提高机械柔性来减小碰
撞的冲击.控制系统的安全性设计方法,包括主动顺应控制(ACC:active compliance contr01)f3】、驱动器力矩限制【4】等,通过触觉、力觉等传感器反馈米实现接触力的控制,是一种主动控制方法.该类方法的关键是如何快速、准确地检测碰撞.
目前,操作臂采用的碰撞检测技术,主要包括基丁腕力传感器和表皮触觉传感器等外部传感器的检测方法,以及通过监测操作臂动力学的当前模型与参考模型的误差【5】来判断碰撞的方法.其中使用腕力传感器只能检测手部的碰撞,限制了碰撞检测的范同;表皮触觉传感器采用传感器阵列式覆盖操作臂外表,虽然减少了检测盲区,但电路布线复杂,降低了1:程实施的可靠性;基于动力学模型误差的监测方法依赖r精确的动力学模型,而如何保证动力学模型参数辨识的精确性和实时性都是技术难题.
本文针对护理型操作臂安全性设计的需要,提出了一种基关节力矩传感器的碰撞检测方法,其利用在腰、肩、肘3个关节驱动轴上串联的力矩传感器米检测关节的实际输出力矩,并与操作臂参考动力学模型计算的关节参考输出力矩进行比较,来实现碰撞检测.本方法具有结构简单、检测灵敏度高、实时性强、检测范围可以覆盖整个操作臂本体的优点.
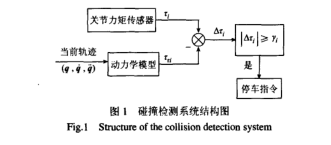
2碰撞检测系统结构(Stmcture of the coIli.sion detection system)
单个关节碰撞检测系统结构如图l所示.一方面,采用在操作臂各关1,驱动轴上串联的力矩传感器检测关节的实际输出力矩向量f;另一方面,通过关节控制器采集到的关:协位置、速度以及通过差分计算出的加速度数据,再利用简化的操作臂动力学模型,估算出操作臂各关节的参考输出力矩向量fr,从而得到实际的输出力矩和参考输出力矩间的力矩偏差向量△f.对不同的关。1,分别设定相应的阂值*,当某个关节的力矩偏差l△曩l超过设定的阈值时,判定发生碰撞,向关节控制器发出停车指令,进入保护状态.
3关节力矩传感器设计(Designofjointtorque senso髂)
3.1力矩传感器的结构设计
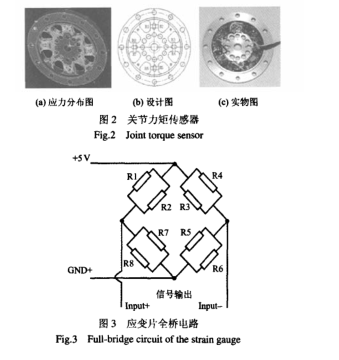
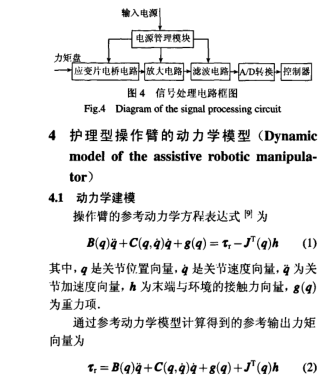
为了检测操作臂运行时各个关节的实际输出力矩向,需要为其配备力矩传感器.力矩传感器串接在关节电机传动输出轴上,由一个粘贴有应变片的力矩盘和信号处理电路组成.应变片组成的全桥电路在受到力矩作用时会输出微弱的电压信号,对该信号进行放人、滤波并进行标定f6】后,可以得出电压信号与力矩对应的线性关系式.结合操作臂关节的结构特点,设计的力矩盘选择圆形的8横梁结构【71,其优点在于输出信号与力矩间的关系式简单,易于标定.力矩盘使用测力传感器的常用材料LYl2,该材料作为力矩传感器的弹性体使用时灵敏度高,材料的比例极限高,重量轻,工艺性能好,散热性好,易做成小型的组合结构,以提高刚度和自振频率,获得稳定性和重复性好的输出信号.选择的麻变片电阻值为350Q.力矩盘有8个横梁,其中4个用于粘贴应变片,另外4个的作用是保护传感器,提高传感器的过载能力.由于力矩盘应变的输出信号很微弱,需选择适当的应变片粘贴位置,使在该位置下得剑的输出信号最强,受其他方向剪切变形的干扰小.图2(a)给出了力矩盘结构的有限元分析结果,从图中可知,传感器在十字横梁位置上受到的应力最大,据此,确定十字横梁两侧为应变片最佳粘贴位置(如图2(b)所示).力矩盘的实物图如图2(c)所示。在力矩盘的4个横梁中粘贴8个应变片,组成两个全桥电路米检测力矩盘输出.按图3方式连接电路,该连接方式可以补偿温度效应和横向力对力矩盘输出信号的影响18J.
3.2信号处理电路的设计
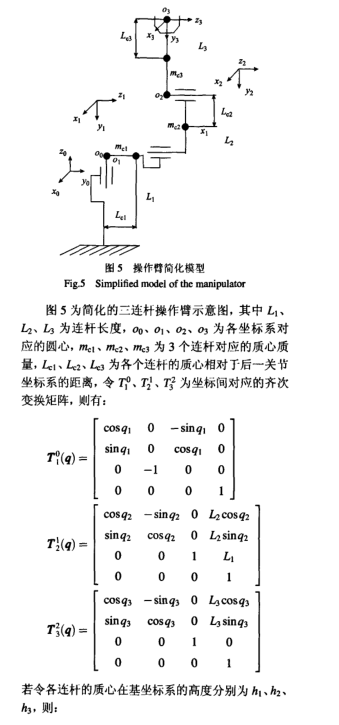
信号处理电路包括电源电路、放大电路和滤波电路.力矩传感器采用单电源供电,通过内部的电源转换电路,将其转换为各个模块需要的多路不同的输出电压.对应变片电桥供电的电源电压的输出纹波要小,以保证获得的输出信号噪声小,采用线性电源转换模块可以满足设计要求.由于应变片电桥的输出信号非常微弱,需要选择温漂小的高精度运放,冈此选择仪表运算放人器设计一级放大电路,它的温漂小,并且可以抑制共模干扰.对信号的滤波采用二阶有源低通滤波器,设置滤波器的截II二频率为1 kHz,可以有效地滤除高频干扰.图4为信号采集放大电路设计的总体框图.
图4信口.处理电路框图
4.2动力学模型的简化与计算
对于工业操作臂而言,护理型操作臂具有质量轻、转动惯量小、关:1了速度和加速度较低的特点.在实际应用中,可以忽略加速度项和速度项的影响.此时,力矩偏差向量△f的估算可化简为:

其中,末端接触力向量^可以通过腕部的六维力/力矩传感器米获得.
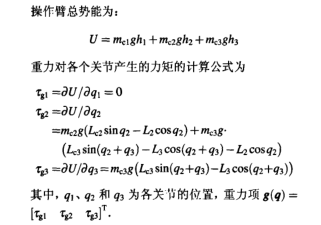
4.3重力项的计算
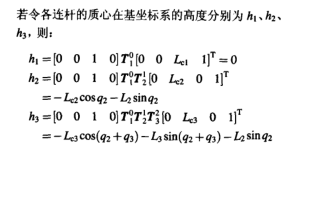
对于6自由度的串联关节式操作臂,由’丁.其腕部3个关:悔的运动对动力学特性的影响较小,可以将腕部与肘关节后的连杆等效为一个迮杆,这样,就可以将操作臂简化为~个三连杆模型,分别对应腰、肩、肘3个关节.采用拉格朗日方程可以计算重力项g(鼋)
5 实验与结果分析(Experiments锄d resultanaIysis)
5.1实验样机
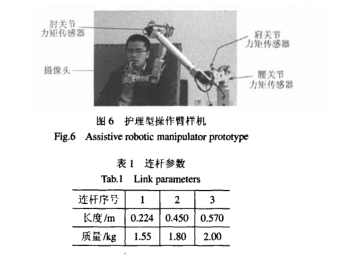
实验平台采用的是自行研制的护理型操作臂样机(如图6所示),其包括6个关节(腰、肩、肘以及3个腕关节)的手臂和1个关节的手爪.等效为3连杆后各连杆的长度和质量参数如表1所示.在操作臂前3个关:1,的减速器输出轴上串联力矩传感器,关+1了位置和速度值通过与关节驱动电机相连的编码器获得.各关:1y的测量和控制采用基于CANopen协议的网络分布式控制系统实现.在操作臂末端安装的摄像头用于识别不同的物体,估计物体在摄像头坐标系的位置,实现视觉伺服和抓取.操作臂运动部分质量为7.74kg,腰、肩、肘3个关骼的最人转速均为30。,s,腕部3个关节的最大转速均为60。/s.
5.2实验结果与分析
碰撞检测的控制周期为1 8 ms,系统能够实时检测剑碰撞并在一个控制周期内对它进行处理.系统碰撞检测的阈值是可变的,可根据对安全性的要求进行设定.在保证不发生误检测的前提下,操作臂前3个关节的碰撞检测闽值M均设置为1 N.m.本文通过操作臂的肘关节与人体的碰撞实验来分析碰撞过程中关:仃力矩偏差△霸和操作臂运动速度的变化情况.分别进行低速(10。/s)和高速(30。,s)情况卜.的碰撞检测实验,实验过程如图7所示.
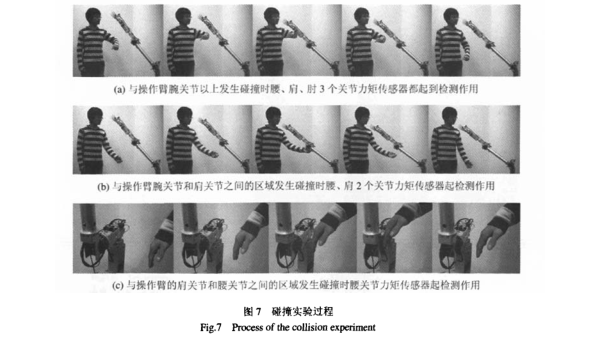
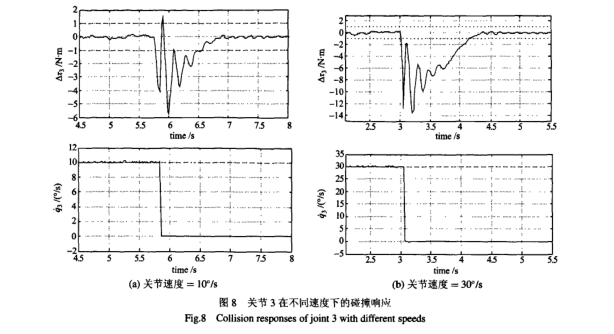
图8给出了实验(如图7(a)所示)的碰撞响应过程中肘关节(关节3)的力矩偏差与关节速度随
时间的变化曲线,图8(a)和(b)分别对应低速和高速两种碰撞情况.从图中可以看到,操作臂在未发生碰撞前,力矩偏著的估算存在小范嗣的误差波动,该误差波动主要来自两个方面:
(1)力矩传感器误差,主要包括温漂等特性误差和迟滞等动态误差.
(2)动力学模型的计算误差,冈为采用的是操作臂的简化动力学模型,且忽略了速度和加速度项,还有摩擦力、布线引起的干扰力/力矩等末建模特性.另外,动力学模型中的重心参数的估算也会存在一定的偏差.因此,动力学模型计算得到的参考输出力矩也会有一定的误差.尽管力矩偏差的计算存在一定的误差,但是通过设定合适的阂值,依然可以在排除误差带来的干扰的同时,灵敏地检测碰撞.分析图8可知,操作臂与人体发生碰撞后,肘
关节的力矩偏差会不断增大并最终超过预先设定的闽值(1 N.m).关节控制器从力矩偏差超出闽值时的下一个周期(18ms)开始停车响应,控制电机快速(18 ms)减速剑O.此时,操作臂与人体仍保持接触,碰撞引起的力矩偏差波动在0.5 s内逐渐收敛剑一2N.m(低速碰撞)和一7N.m(高速碰撞).其后,随着人体脱离与操作臂的接触,力矩偏差恢复至阈值范围内.比较两个不同速度下的碰撞实验数据可知,操作臂高速运动时,本身的力矩偏差波动较大,对检测系统的干扰也会变人,而且速度越高,碰撞时的力矩偏差也会越大.
6结论(Conclusion)
本文提出了一种基丁碰撞检测的护理型操作臂安全性设计方法,其利用实际输出力矩和参考输出力矩间的力矩偏差实现碰撞检测,进而采取碰撞响应来保证安全性.在用于测量实际输出力矩的关节力矩传感器设计中,采用了有限元应力分析方法来优化应变片的粘贴位置,并开发了温漂小、抗干扰能力强的放人和滤波电路.操作臂的参考输出力矩由动力学模型计算获得,根据操作臂的低速特点,给出了简化动力学模型和重力项的计算方法,在计算效率和精确性之间实现了折中.分布在各关节的碰撞检测系统可以实现操作臂本体的全覆盖检测,具有较高的灵敏度和实时性.护理型操作臂样机的碰撞实验结果表明了所提方法的有效性.
.jpg)




